O sensor de indutância sem contato é posicionado como um sensor capaz de reagir a objetos de metal capturados em seu campo eletromagnético. Graças a esta propriedade dos sensores indutivos de proximidade, é possível rastrear o movimento das partes móveis do equipamento e, se necessário, desligar o motor do mecanismo de acionamento. Para reconhecer e analisar mudanças no campo magnético, uma unidade eletrônica especial chamada de controlador (comparador) é introduzida em sua composição.
Dispositivo e princípio de operação

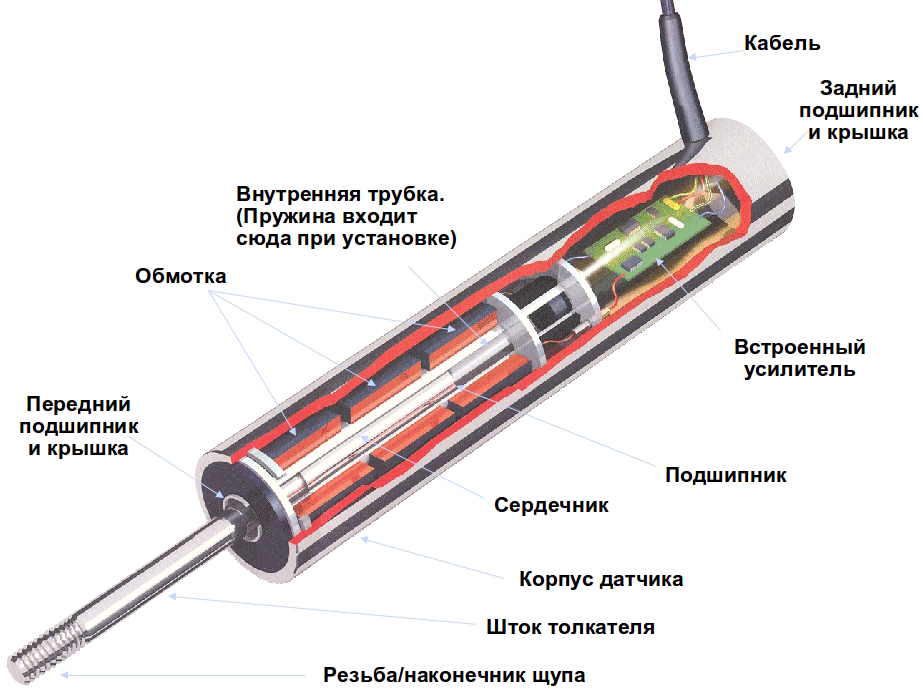
Os sensores de posição de indução, além de um comparador eletrônico, contêm os seguintes componentes obrigatórios:
- caixa de aço com conector para cabo de conexão;
- um elemento sensível embutido que registra mudanças no campo magnético é feito na forma de um núcleo de aço com uma bobina;
- módulo de relé executivo;
- indicador de ativação no LED.
O design de diferentes modelos de sensores de metal pode ter algumas diferenças. Eles não afetam o sensor de indução em si, o princípio de seu funcionamento não muda a partir disso.
De acordo com o dispositivo do dispositivo, a essência de sua operação é descrita como segue:
- mover a parte de metal do objeto controlado leva a uma mudança na indutância do elemento sensível do sensor;
- o desvio é explicado pela distorção de seu campo magnético, o que resulta na alteração dos parâmetros do circuito elétrico e seu acionamento (o LED acende);
- em seguida, o módulo eletrônico é acionado e envia um sinal para o dispositivo executivo;
- quando um impulso é recebido sobre exceder o limite permitido por movimento, o nó de saída (relé) desconecta o equipamento monitorado da rede.
Cada modelo tem sua própria sensibilidade ao movimento - diferença de deslocamento. Para amostras diferentes, este parâmetro varia de 1 mícron a 20 milímetros.
Parâmetros do sensor indutivo

Além da faixa de resposta ou sensibilidade, um sensor indutivo é caracterizado pelos seguintes indicadores de desempenho:
- O tamanho (diâmetro) do fio de aterragem, para várias amostras, tomando valores de 8 a 30 mm.
- Tensão de alimentação nominal a uma temperatura de mais 20 graus, até 90 Volts DC e até 230 Volts - correntes AC.
- Comprimento total do corpo - seu valor depende da tensão de operação.
O último indicador para diferentes amostras pode variar significativamente.
Para a zona sensível ou ativa do dispositivo, outro parâmetro é introduzido, denominado limite de resposta garantida. Seu limite inferior é zero e o superior é 80 por cento do valor nominal. Este indicador é às vezes chamado de fator de correção da folga de trabalho.
Um indicador igualmente importante da funcionalidade de um dispositivo sensível é o número de fios de conexão no conector. Normalmente são dois ou três deles: dois de alimentação e um para acionamento do circuito. No entanto, as opções de conexão são possíveis, para a disposição dos quais quatro ou cinco pontos de contato são usados. Amostras semelhantes, além de dois condutores de alimentação, contêm duas saídas para a carga. Neste caso, o quinto condutor é usado para selecionar o modo de operação do próprio dispositivo.
Tipos de saídas e métodos de conexão
Para avaliar a ação de um dispositivo sensível, é introduzida uma característica especial, avaliada pelo estado da polaridade de seus parâmetros de saída. De acordo com a designação geralmente aceita dos elementos semicondutores (transistores) incluídos no circuito eletrônico do sensor, essas saídas são denominadas "PNP" e "NPN".
A diferença entre esses nomes é que eles denotam diferentes polaridades (pólos) da fonte de alimentação de dispositivos sensíveis. Os transistores PNP trocam sua saída positiva e NPN - negativa. A carga dos circuitos de saída é geralmente o microprocessador de controle.
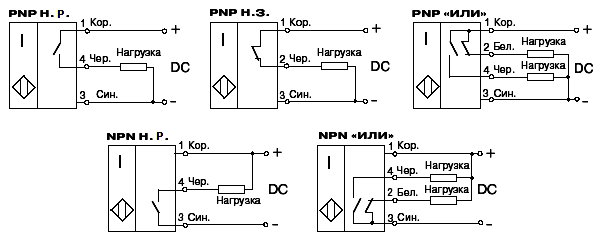
Dependendo do esquema de controle do controlador, os sensores indutivos são designados como HO (normalmente aberto) ou HZ - com uma entrada normalmente fechada.
A opção de transistor NPN é a maneira mais comum de ligar o sensor, já que o circuito padrão torna o fio negativo comum a todos os componentes. Nesse caso, as entradas dos microprocessadores e outros dispositivos de monitoramento são ativadas com uma tensão positiva.
Marcação de conexão
Em diagramas esquemáticos, os sensores indutivos são geralmente indicados como um losango ou quadrado com duas linhas verticais dentro. Freqüentemente, eles também indicam o tipo de saída (normalmente aberta ou fechada), correspondente a uma das variedades de transistores semicondutores. A maioria das opções de circuito indicam um grupo normalmente fechado ou ambos os tipos no mesmo invólucro.
Codificação de cores de chumbo

Na prática, é usado um sistema padrão de marcação das pontas dos sensores de indutância, que é seguido por todos os fabricantes de dispositivos sensíveis, sem exceção. Porém, antes de instalá-los, recomenda-se observar atentamente a polaridade de conexão e verificar as instruções fornecidas com os produtos.
Todos os sensores têm um desenho de fio codificado por cores em seus invólucros, se o tamanho permitir.
Ordem padrão de designação:
- azul (azul) sempre significa barramento de alimentação negativo;
- a cor marrom (marrom) denota um condutor positivo;
- preto (preto) corresponde à saída do sensor;
- Branco é uma saída ou entrada auxiliar.
Para esclarecer a última designação de marcação, ela deve ser verificada em relação aos dados das instruções anexadas ao dispositivo específico.
Erros de sensor

O erro ao fazer leituras pelo sistema de controle afeta significativamente a operação do sensor indutivo sem contato. Seu valor total é coletado de erros de medição individuais para vários indicadores: eletromagnético, temperatura, hardware, elasticidade magnética e muitos outros.
O erro eletromagnético é definido como uma quantidade que ocorre aleatoriamente. Parece ser devido a um EMF parasita induzido na bobina por campos magnéticos externos. Em um ambiente de produção, este componente é criado por equipamentos de energia com uma frequência operacional de 50 Hertz. O erro de temperatura é um dos indicadores mais importantes, pois a maioria dos sensores pode funcionar apenas em uma determinada faixa de temperatura. Deve ser levado em consideração ao projetar dispositivos desta classe.
O erro de elasticidade magnética é apresentado como um indicador da instabilidade das deformações do núcleo que ocorre durante a montagem do dispositivo, bem como o mesmo fator, mas se manifesta durante o seu funcionamento. A instabilidade das tensões internas no circuito magnético leva a erros no processamento do sinal de saída. O erro que ocorre no dispositivo mais sensível aparece devido à influência da estrutura do campo no coeficiente de deformação dos elementos metálicos do sensor. Além disso, seu valor total é significativamente afetado por folgas e folgas nas partes móveis da estrutura.
O erro do cabo de conexão é obtido a partir dos desvios do valor da resistência de seus núcleos de fios dependendo do fator de temperatura, bem como da indução de campos eletromagnéticos estranhos e CEM. O erro do extensômetro como uma variável aleatória depende da qualidade de fabricação dos elementos de enrolamento do sensor (suas bobinas, em particular). Sob várias condições de operação, uma mudança na resistência DC do enrolamento é possível, levando à "flutuação" do sinal de saída. O erro de envelhecimento se manifesta devido ao desgaste dos elementos móveis do sensor, bem como alterações nas propriedades eletromagnéticas do circuito magnético.
É possível verificar o valor real deste parâmetro apenas com a ajuda de instrumentos de medição ultraprecisos. Neste caso, as características cinemáticas do próprio sensor devem ser levadas em consideração. Ao projetar e fabricar elementos sensíveis, esta possibilidade é levada em consideração antecipadamente em seu projeto.
Os sensores indutivos e capacitivos são caracterizados por modos de operação com muitos fatores de influência determinados por condições operacionais específicas. É por isso que a escolha da sensibilidade e um conjunto de parâmetros de saída adequados para uma determinada marca de dispositivo é decisiva ao usá-lo como chave fim de curso.







