Den beröringsfria induktanssensorn är placerad som en sensor som kan reagera på metallföremål som fångas i dess elektromagnetiska fält. Tack vare den här egenskapen hos induktiva närhetssensorer är det möjligt att spåra rörelsen hos utrustningens rörliga delar och, om nödvändigt, stänga av drivmekanismens motor. För att känna igen och analysera förändringar i magnetfältet introduceras en speciell elektronisk enhet som kallas en styrenhet (komparator) i deras sammansättning.
Anordning och funktionsprincip

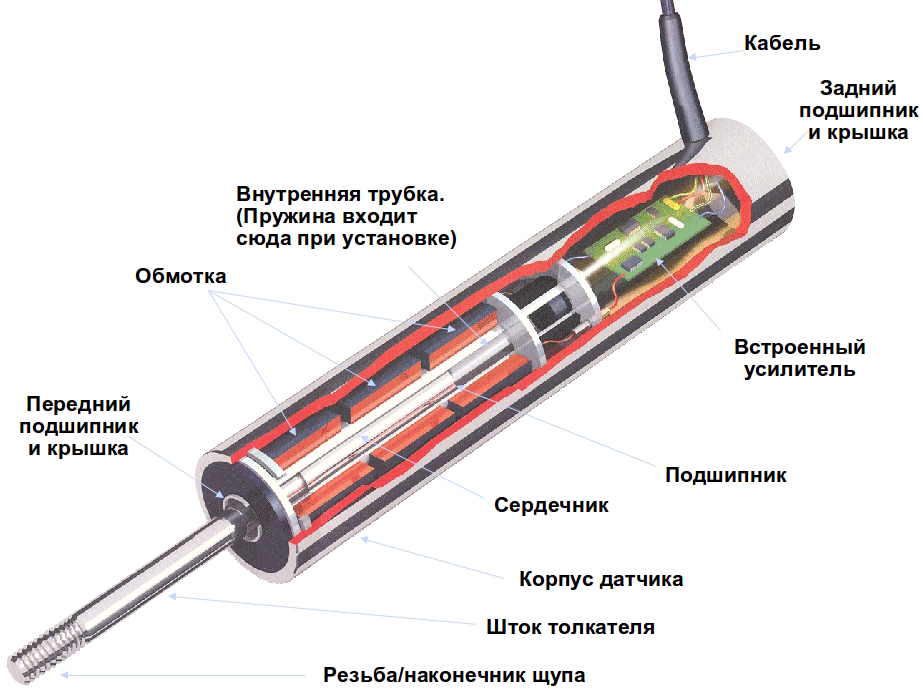
Induktionspositionssensorer, förutom en elektronisk komparator, innehåller följande obligatoriska komponenter:
- stålväska med kontakt för anslutningsledning;
- ett inbyggt känsligt element som registrerar förändringar i magnetfältet görs i form av en stålkärna med en spole;
- modul för verkställande relä;
- aktiveringsindikator på lysdioden.
Utformningen av olika modeller av metallsensorer kan ha vissa skillnader. De påverkar inte själva induktionssensorn, principen för dess funktion ändras inte från detta.
I enlighet med enhetens enhet beskrivs kärnan i dess funktion enligt följande:
- flyttning av metalldelen av det kontrollerade föremålet leder till en förändring i induktansen hos det känsliga elementet i sensorn;
- avvikelsen förklaras av förvrängningen av dess magnetfält, vilket resulterar i en förändring av parametrarna för den elektriska kretsen och dess aktivering (lysdioden tänds);
- därefter utlöses den elektroniska modulen och skickar en signal till den verkställande anordningen;
- när en impuls mottas om att överskrida den tillåtna gränsen genom rörelse, kopplar utgångsrelänoden från den övervakade utrustningen från nätverket.
Varje modell har sin egen rörelsekänslighet - offsetgap. För olika prover varierar denna parameter från 1 mikron till 20 millimeter.
Induktiva sensorparametrar

Förutom svarsområdet eller känsligheten kännetecknas en induktiv sensor av följande prestandaindikatorer:
- Landningstrådens storlek (diameter), för olika prover, med värden från 8 till 30 mm.
- Nominell matningsspänning vid en temperatur på plus 20 grader, upp till 90 Volt DC och upp till 230 Volt - AC-strömmar.
- Total kroppslängd - dess värde beror på driftspänningen.
Den senare indikatorn för olika prover kan variera avsevärt.
För enhetens känsliga eller aktiva zon införs en annan parameter som kallas den garanterade svarsgränsen. Dess nedre gräns är noll och den övre är 80 procent av det nominella värdet. Denna indikator kallas ibland korrigeringsfaktorn för arbetsavstånd.
En lika viktig indikator på en känslig enhets funktionalitet är antalet anslutningsledningar i kontakten. Vanligtvis finns det två eller tre av dem: två matningar och en för att aktivera kretsen. Anslutningsalternativ är dock möjliga, för arrangemang av vilka fyra eller fem kontaktpunkter används. Liknande prover, förutom två matningsledare, innehåller två utgångar till lasten. I detta fall används den femte ledaren för att välja driftläget för själva enheten.
Typer av utgångar och anslutningsmetoder
För att bedöma effekten av en känslig enhet introduceras en speciell egenskap, utvärderad av tillståndet för polariteten för dess utmatningsparametrar. I enlighet med den allmänt accepterade beteckningen av halvledarelement (transistorer) som ingår i sensorns elektroniska krets, kallas dessa utgångar "PNP" och "NPN".
Skillnaden mellan dessa namn är att de betecknar olika polariteter (poler) hos känsliga enheter. PNP-transistorer växlar sin positiva effekt och NPN - negativ. Lasten på utgångskretsarna är oftast styrmikroprocessorn.
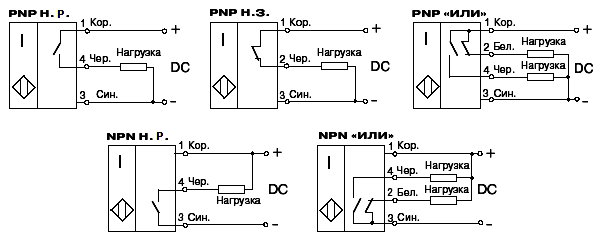
Beroende på styrsystemets styrschema betecknas induktiva sensorer som HO (normalt öppen) eller HZ - med en normalt stängd ingång.
Alternativet NPN-transistor är det vanligaste sättet att sätta på sensorn, eftersom standardkretsar gör den negativa ledningen gemensam för alla komponenter. I detta fall aktiveras ingångarna till mikroprocessorer och andra övervakningsenheter med en positiv spänning.
Anslutningsmarkering
På schematiska diagram betecknas induktiva sensorer vanligtvis som en romb eller kvadrat med två vertikala linjer inuti. Ofta anger de också typen av utgång (normalt öppen eller stängd), vilket motsvarar en av sorterna av halvledartransistorer. De flesta kretsalternativ indikerar en normalt stängd grupp eller båda typerna i samma hus.
Bly färgkodning

I praktiken används ett standardsystem för att markera ledningarna för induktanssensorer som följs av alla tillverkare av känsliga enheter utan undantag. Innan du installerar dem rekommenderas det dock att noggrant observera anslutningens polaritet och kontrollera instruktionerna som medföljer produkterna.
Alla sensorer har en färgkodad trådritning på sina höljen, om storleken tillåter det.
Standardordning för beteckning:
- blått (blått) betyder alltid negativ motorväg;
- brun färg (brun) betecknar en positiv ledare;
- svart (svart) motsvarar sensorns utgång;
- Vit är en extra utgång eller ingång.
För att klargöra den sista märkningsbeteckningen bör den kontrolleras mot informationen i instruktionerna som bifogas den specifika enheten.
Sensorfel

Felet vid avläsning av styrsystemet påverkar signifikant funktionen för den beröringsfria induktiva sensorn. Dess totala värde samlas in från individuella mätfel för olika indikatorer: elektromagnetisk, temperatur, hårdvara, magnetisk elasticitet och många andra.
Elektromagnetiskt fel definieras som en slumpmässigt förekommande mängd. Det verkar på grund av en parasitisk EMF inducerad i spolen av yttre magnetfält. I en produktionsmiljö skapas denna komponent av kraftutrustning med en arbetsfrekvens på 50 Hertz. Temperaturfel är en av de viktigaste indikatorerna, eftersom de flesta sensorer bara kan fungera i ett visst temperaturintervall. Det måste tas med i beräkningen när du utformar enheter av denna klass.
Felet med magnetisk elasticitet införs som en indikator på instabiliteten hos kärndeformationerna som uppstår under monteringen av enheten, liksom samma faktor, men manifesterar sig under dess drift. Instabiliteten hos interna spänningar i magnetkretsen leder till fel i bearbetningen av utsignalen. Felet som uppstår i den mest känsliga enheten visas på grund av påverkan av fältstrukturen på deformationskoefficienten för sensorelementens metallelement. Dessutom påverkas dess totala värde signifikant av motreaktioner och avstånd i konstruktionens rörliga delar.
Felet i anslutningskabeln är hämtad från avvikelserna i resistansvärdet för dess trådkärnor beroende på temperaturfaktorn, liksom induktion av främmande elektromagnetiska fält och EMF. Töjningsfelet som en slumpmässig variabel beror på tillverkningskvaliteten hos sensorns lindningselement (särskilt dess spolar). Under olika driftsförhållanden är det möjligt att ändra lindningens likströmsmotstånd, vilket leder till att utsignalen "svävar". Åldringsfelet manifesteras på grund av slitaget på sensorns rörliga element såväl som förändringar i magnetkretsens elektromagnetiska egenskaper.
Det är möjligt att kontrollera det verkliga värdet av denna parameter endast med hjälp av ultraprecisa mätinstrument. I det här fallet måste de kinematiska egenskaperna hos själva sensorn beaktas. Vid design och tillverkning av känsliga element beaktas denna möjlighet i förväg vid dess design.
Induktiva och kapacitiva sensorer kännetecknas av driftsätt med många påverkande faktorer bestämda av specifika driftsförhållanden. Därför är valet av känslighet och en uppsättning utmatningsparametrar som är lämpliga för ett visst märke av enhet avgörande när det används som gränslägesbrytare.







